Guest commentary from Juliane Fry, UC Berkeley
The recently released IPCC 2007 Fourth Assessment Report Summary for Policymakers reminds us that aerosols remain the least understood component of the climate system. Aerosols are solid or liquid particles suspended in the atmosphere, consisting of (in rough order of abundance): sea salt, mineral dust, inorganic salts such as ammonium sulfate (which has natural as well as anthropogenic sources from e.g. coal burning), and carbonaceous aerosol such as soot, plant emissions, and incompletely combusted fossil fuel. As should be apparent from this list, there are many natural sources of aerosol, but changes have been observed in particular, in the atmospheric loading of carbonaceous aerosol and sulphates, which originate in part from fossil fuel burning. While a relatively minor part of the overall aerosol mass, changes in the anthropogenic portion of aerosols since 1750 have resulted in a globally averaged net radiative forcing of roughly -1.2 W/m2, in comparison to the overall average CO2 forcing of +1.66 W/m2.
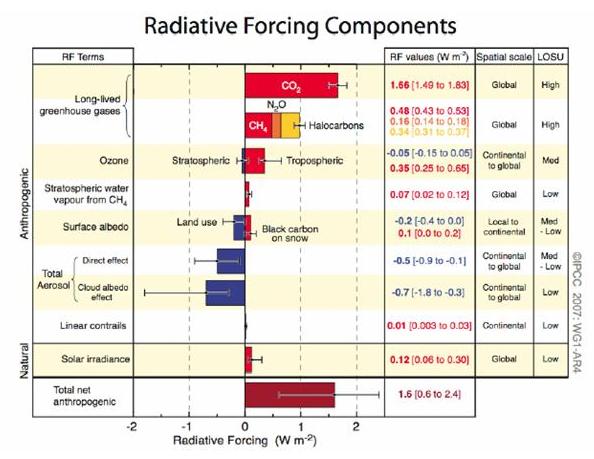 Figure SPM-2, shown here, compares the radiative forcing for greenhouse gases and other climate forcing agents, along with an assessment of the level of scientific understanding (“LOSU”) for each component. In this figure, it is clear that while aerosols contribute the largest negative (cooling) radiative forcing, the level of scientific understanding of their climate influence is “low” to “medium-low”. The aerosol effects are split into two categories: (1) direct effects, meaning the scattering or absorption of radiation by aerosols influencing the net amount of energy reaching the Earth’s surface, and (2) indirect effects, such as the cloud albedo effect, referring to how the presence of aerosol increases cloud reflectivity by providing a larger number of nuclei for cloud droplets, reducing the amount of energy reaching the surface. This is a step up from the last report, where the LOSU for aerosols was very low to low, and no most likely value was assigned at all for the ‘indirect’ part.
Figure SPM-2, shown here, compares the radiative forcing for greenhouse gases and other climate forcing agents, along with an assessment of the level of scientific understanding (“LOSU”) for each component. In this figure, it is clear that while aerosols contribute the largest negative (cooling) radiative forcing, the level of scientific understanding of their climate influence is “low” to “medium-low”. The aerosol effects are split into two categories: (1) direct effects, meaning the scattering or absorption of radiation by aerosols influencing the net amount of energy reaching the Earth’s surface, and (2) indirect effects, such as the cloud albedo effect, referring to how the presence of aerosol increases cloud reflectivity by providing a larger number of nuclei for cloud droplets, reducing the amount of energy reaching the surface. This is a step up from the last report, where the LOSU for aerosols was very low to low, and no most likely value was assigned at all for the ‘indirect’ part.
This figure also visually hints at why improving our understanding of aerosol’s role in climate is so important: while overall net radiative forcing is positive (warming), aerosols provide the dominant negative (cooling) forcings. Hence, the aerosol currently in our atmosphere is acting to mask some of the greenhouse gas-induced warming. This means that as we get our act together to reduce fossil fuel use to improve air quality and address global warming, we need to be mindful of how changes in emissions will impact aerosol concentrations and composition.
In addition, our deficient understanding of aerosol forcing also hinders our ability to use the modern temperature record to constrain the “climate sensitivity” – the operative parameter in determining exactly how much warming will result from a given increase in CO2 concentration. The determination of climate sensitivity has been discussed in this forum previously here. The sensitivity parameter can be derived by examining historical records of the correlation of CO2 concentration and temperature taking into account other contemporary changes. Aerosols contribute significantly to the uncertainty in climate sensitivity because we cannot model their historical impact on the temperature record with sufficient accuracy, though additional constraints on climate sensitivity such as the last ice age do exist. A better understanding of aerosols then may well facilitate more accurate predictions of future climate responses to changing CO2.
The relative lifetimes of CO2 and aerosol in the atmosphere result in the expectation that reducing fossil fuel use will accelerate warming. A CO2 molecule has a lifetime of about 100 years in the atmosphere, while an aerosol particle has an average life expectancy of only about 10 days. Therefore, if we instantaneously ceased using combustion engines, the (cooling) fossil fuel-related aerosols would be cleaned out of the atmosphere within weeks, while the (warming) CO2 would remain much longer, leaving a net positive forcing from the reduction in emissions for a century or more.
So, what do we need to learn about aerosol to narrow those error bars in Figure SPM-2? To accurately model aerosols’ climate impact, we need to know about the whole lifespan of the aerosols: their diverse sources, aging processes (and how those affect radiative properties), how they mix together and the mechanisms and timescales for its removal from the atmosphere. As the IPCC 2007 4AR will make clear, we’ve come a long way in our understanding of atmospheric aerosol, but there is still plenty of room for improvement.
Comentário convidado de Juliane Fry, UC Berkeley
O Quarto Relatório de Avaliação do IPCC 2007 Sumário para Políticos recentemente divulgado, nos lembra que os aerossóis permanecem o menos compreendido componente do sistema climático. Aerossóis são partículas sólidas ou líquidas suspensas na atmosfera, consistindo de (em ordem aproximada de abundância): sal marinho, poeira mineral, sais inorgânicos como o sulfato de amônia (que vem de fontes naturais e antropogênicas, como a queima de carvão), e aerossóis carbonatados como a fuligem, emissões de plantas, e combustíveis fósseis incompletamente queimados. Como deve ser aparente desta lista, há muitas fontes de aerossóis, mas mudanças foram observadas, em particular na carga atmosférica de aerossóis carbonatados e sulfatos, que se originam em parte da queima de combustíveis fósseis. Apesar de serem uma parte relativamente pequena da massa total de aerossóis, mudanças na contribuição antropogênica dos aerossóis desde 1750 resultaram numa forçante radiativa média de aproximadamente -1.2 W/m2, relativa a uma forçante global devido ao CO2 de +1.66 W/m2.
Figura SPM-2, mostrada aqui, compara a forçante radiativa para gases de efeito estufa e outros agentes, junto com uma avaliação do nível de entendimento científico (cuja sigla em inglês é LOSU), para cada componente. Nesta figura, está claro que os aerossóis contribuem com a maior forçante negativa (resfriamento), e que seu nível de entendimento varia de “baixo” a “meio baixo”. Os efeitos dos aerossóis se dividem em duas categorias: (1) efeitos diretos, relativos ao espalhamento ou à absorção da radiação pelos aerossóis, influenciando a quantidade líquida de energia que chega à superfície da Terra, e (2) efeitos indiretos, como o albedo das nuvens, referindo-se a como a presença dos aerossóis aumenta a refletividade de nuvens ao proporcionar um número maior de núcleos para a formação de gotas, reduzindo a quantidade de energia que chega a superfície. Isto já representa um passo a frente com relação ao último relatório, , onde o LOSU para os aerossóis variava de muito baixo a baixo, e nenhum valor mais provável era assinalado para a parte “indireta”.
Esta figura virtualmente sugere por que melhorar nossa compreensão sobre o papel dos aerossóis no clima é tão importante: enquanto a forçante radiativa líquida global é positiva (aquecimento), aerossóis representam as forçantes negativas (resfriamento) dominante. Consequentemente, os aerossóis atualmente em nossa atmosfera estão atuando de forma a mascarar parte do aquecimento induzido pelos gases de efeito estufa (GEE). Isto significa que ao agirmos para reduzir o uso de combustíveis fósseis para melhorar a qualidade do ar e atacar o aquecimento global, devemos ter em mente como estas mudanças nas emissões vão impactar a concentração e a composição dos aerossóis.
Além disso, nossa deficiência em compreender os aerossóis também prejudica nossa habilidade de utilizar o moderno registro de temperaturas para restringir a “sensibilidade climática” – o parâmetro operacional para determinar exatamente quanto de aquecimento resultará de um dado aumento na concentração de CO2. A determinação da sensibilidade climática foi discutida anteriormente neste fórum aqui. O parâmetro de sensibilidade pode ser obtido a partir do exame dos registros históricos da correlação entre a concentração de CO2 e a temperatura, levando-se em conta outras mudanças contemporâneas. Aerossóis contribuem significativamente para a incerteza na sensibilidade climática pois não podemos modelar o seu impacto no registro de temperaturas com precisão suficiente, apesar de existirem certas restrições à sensibilidade climática, como a última era glacial. Um melhor entendimento sobre aerossóis pode permitir previsões mais acuradas sobre a resposta do clima futura a variações no CO2.
Os tempos de vida relativos do CO2 e dos aerossóis na atmosfera resultam na expectativa de que uma redução no uso de combustíveis fósseis acelerará o aquecimento. A molécula do CO2 tem um tempo de vida de aproximadamente 100 anos na atmosfera, enquanto uma partícula de aerossol possui uma expectativa de vida média de apenas 10 dias em média. Assim, se nós instantaneamente pararmos de usar motores a combustão, os aerossóis (resfriadores) associados aos combustíveis fósseis seriam removidos da atmosfera em algumas semanas, enquanto as (aquecedoras) moléculas de CO2 permaneceriam por muito mais tempo, deixando uma forçante líquida positiva devido a redução das emissões por um século ou mais.
Assim, o que precisamos saber mais sobre os aerossóis para estreitar as barras de erro da Figura SPM-2? Para modelar precisamente o seu impacto no clima, necessitamos saber mais sobre todos os aspectos da vida dos aerossóis: suas diversas fontes, seu processo de envelhecimento (e como este afeta suas propriedades radiativas), como se misturam e os mecanismos e as escalas de tempo de sua remoção da atmosfera. Como o IPCC 2004 4AR deixará claro, percorremos um longo caminho na compreensão dos aerossóis atmosféricos, mas há ainda muito espaço para melhorarmos.
traduzido por Fernando M. Ramos e Ivan B. T. Lima
They’re still at it: environmental scholar Bjorn Lomborg, citing a 1997 atmosphere-ocean general circulation model, observes that “the increase in direct solar irradiation over the past 30 years is responsible for about 40 percent of the observed global warming.”
http://www.opinionjournal.com/columnists/pdupont/?id=110009693
Good ole Pete du Pont. All the deniers are on this sun kick, along with a revisionist history of the LIA, MWP, and out and out libel in my view over the hockey stick flaw. At some point can’t they be held accountable for lying? Is that an unalienable right?
[Response: If readers en masse refuse to purchase the paper until the editorial board stops using their perch to spread lies and propaganda, the WSJ might think twice next time. In the meantime, a google search on “Wall Street Journal editorial” might make you feel a bit better. –mike]
re: the difference between 10 days (aerosols) and 100 years (CO2)
That’s a nasty conundrum: if we do something about active production of CO2, we accelerate the effects because of the lack of aerosols.
Does that sound like a recipe for fatalism? You betcha.
I’m just terribly grateful to RealClimate for consistently posting this exceptional level of crisp exposition. You folks are really making a difference. Thank you for the generous contribution of your time toward providing this unparalleled forum.
One of the big problems with aerosols is that they interact with clouds, that other “great unknown” in climate modelling. If clouds were well-represented by the models then untangling the influence of aersols would be hard enough, but… clouds are poorly represented in models at present [though much improved compared to ~10 years ago].
To be honest I don’t think this scientific problem is going to be “solved” soon enough to have an impact on the crucial policy decisions of the next 10 years.
RE: Jeffrey (#2)
I prefer to see it as MORE inspiration to (1) figure out how to reduce CO2 emissions quickly – because the warming we’ve seen so far has been somewhat masked by aerosol, and (2) really work hard to understand all the aerosol climate effects more completely (look at those error bars!)
Remember also, the warming caused by increased CO2 has a time lag, so the sooner and more rapidly we reduce CO2 emissions, the better. We can do this, we just need to take the problem seriously, especially because of the (more uncertain) aerosol cooling.
“Aerosols are solid or liquid particles suspended in the atmosphere, consisting of (in rough order of abundance): sea salt, mineral dust, …”
That’s in decreasing order of abundance, I take it? That is, sea salt is the most abundant, followed by mineral dust, etc.? (The wording is a little ambiguous.)
… changes in the anthropogenic portion of aerosols since 1750 have resulted in a globally averaged net radiative forcing of roughly -1.2 W/m2, in comparison to the overall average CO2 forcing of +1.66 W/m2.
What is a rough range of accuracy for the -1.2 W/m2?
My thought is that globally averaged net radiative forcing on a decade basis will change only slightly. It’s important not to loose focus on the need to act on drastically reducing our CO2 emissions.
Very nice explanation, Juliane. Thank you for your insights. I actually just took part in a discussion at Open Mind, in which a skeptic raised this issue of the lack of understanding about the effects of aerosols on our climate, stating that the IPCC’s scientific understanding is “very low”. Like many other skeptics, he was first misrepresenting the actual level of understanding, and then used it as a reason for discounting any scientific statements about the effects of aerosols, because supposedly one must accept too many assumptions.
Anyways, I appreciate your information on the subject, which clearly demonstrates that, while there is room for improvement, much has already been discovered.
Because we need to decrease GHG emissions dramatically in any scenario, it would seem wiser to reduce as quickly as possible despite additional warming caused by aerosol reductions. The longer we wait, the greater the likelihood that this ultimately unavoidable reduction in aerosols will have an even greater warming related effect.
Hi Juliane
thanks for this interesting post
can we obtain the recent evolution, year by year, of aerosols forcing evolution (since 1990 for example)?
How can we understand “low level of understanding”?
Is this the understanding of accurate physical mechanism?
Does the given range of forcing depend on this understanding or on the measurements?
What is Juliane’s URL?
Why do I never hear that the CO2 greenhouse effect is saturated ?
Why do I never see reference to the fact that CO2 absorption is concentrated in a wavelength band centered at 15 micro meters?
Re #11: “Why do I never hear that the CO2 greenhouse effect is saturated ?”
Umm… How shall I say this? For much the same reason that you don’t hear a whole lot about the Earth being flat :-)
Juliane, a lecture I attended about a year ago pointed out that one of the problems with constraining aerosols is poor knowledge of their time history. It wasn’t till the middle to late twentieth century that direct measurements on large scales became practical. And because aerosols are often so short lived and so spatially inhomogenous, it is very difficult to reconstruct an adequate picture from proxies like ice core data. As a result, the speaker stated that a large chunk of the uncertainty comes from not having firm constraints on what the natural aerosol loading was circa 1750. I wonder if you could comment on this, and whether any progress is being made in paleo-reconstruction.
Secondly, could you comment on the degree to which the overall uncertainty is a matter of things that no one yet claims to understand versus areas where different researchers reach mutually incompatible conclusions. I recall that the indirect effect is known to give some examples of the second kind of uncertainty. If I recall correctly, the effect of high sulphate aerosol concentrations on cloud lifetime is one such area, where observational studies and cloud models have been disagreeing even on the sign of the effect (i.e. whether high sulphate leads to longer or shorter cloud lifetimes).
Thanks.
Re: #6.
Yes, that order of aerosol components is in decreasing magnitude by MASS. Mineral dust and sea salt particles are primarily supermicron in diameter and thus constitute the bulk of aerosol mass. Depending on which estimate you read either mineral dust or sea salt it the largest aerosol component by mass.
However, by number (which matters more for aerosol-cloud interactions) the submicron particle types dominate. These include organic carbon, soot (also known as black carbon or elemental carbon), and secondary aerosol components such as ammonium sulphate and ammonium nitrate. Pure ammonium sulphate rarely exists in the atmosphere (though models often parameterise them this way!) and are typically internally mixed with submicron soot, organic carbon, etc. aerosols. The mixing state of aerosols is a very complicated but important topic that isn’t well represented in aerosol models (and even less so in climate models), partly because the models lack good empirical imputs for these parameters.
One interesting result of the mixing state concerns ammonium sulphate and soot. Soot is the most absorbing aerosol component and causes a positive radiative forcing. Ammonium sulphate is highly reflective, scatters solar radiation very well, and causes a negative forcing. However, when you have a particle that is internally mixed with soot and ammonium sulphate (say a core of soot with a coating of ammonium sulphate around it), the ammonium sulphate coating acts as a lens to focus light into the absorbing soot core. Thus by mixing the two aerosol components you end up with an overall more absorbing aerosol (higher positive forcing) than when the two aerosol types are externally mixed in their pure forms. This is one of the best examples of why aerosol mixing state is so important for modeling the effect of aerosols on climate.
Re: #12 by James. L.D. Danny Harvey, “Global Warming – the Hard Science”, Prentice Hall, pp. 153-156 has forcing vs. CO2 concentration. The 15 micrometer band forcing falls in the logarithmic regime (bottom of p. 155). Fig. 7.11 shows some nonlinearity at twice the pre-industrial CO2 level.
Believe it or not, skeptics have twisted this revision in aerosols to argue that climate change is not as bad we thought. I blogged about this new argument here.
I guess “clean coal” (that reduces aerosol aspects, but not the CO2) is not a good solution to environmental problems, even though it would reduce acid rain; better to reduce fossil fuels altogether.
Re #1, I thought Lomborg was only a “money could best be spent elsewhere” denialist, who admitted that AGW was happening, but his heart went out to the masses suffering from other causes, who should be aided first. So now we see his true motive. And I wonder how much he really cares about the suffering masses.
And about the sun — without it the whole problem would be moot, including ourselves. So it is a major culprit, the way it just keeps shining and shining. I guess that small “solar irradiance” bar is for the increased shining, and does not represent the total shining?
Re # 5, I agree with you, Juliane, that we need to reduce GHGs, even though those same measures might reduce the cooling aerosol effect.
Somehow I wouldn’t worry about us reducing too fast, even if we put our whole heart, mind, soul, and effort into it (& all the contrarians converted to AGW believers & really started helping solve the problem, rather than dragging their feet kicking & screaming). Even in the best case reduction scenario the logistics are tremendous; it would take decades to get us down to the 70% money-saving cuts that are feasible with today’s technology, and a decade or so more to get the rich of the world (us) to actually sacrifice and reduce our living standards so as to get down to an 80%+ cut.
I know an architect who build a passive solar home that uses only a fraction of the gas & electricity of a comparable home (& that’s without PV panels). Considering all the homes & buildings now going up WITHOUT even the passive techniques that don’t have additional costs & that have been known about and practiced for over 2,500 years (see: http://www.amazon.com/golden-thread-years-architecture-technology/dp/0442240058 )….Today’s home are flagrantly inefficient….it seems like a big job to get architects to change habits. And then those wrongly-built houses & buidlings are here for decades to come. It really breaks my heart that at the first whiff of a problem (the 70s energy crunch) the field of architecture didn’t completely (or even somewhat) embrace passive solar techniques.
Wow. “aerosols remain the least understood component of the climate system.”
Aerosols have a net radiative forcing of -1.2 W/m2 against a CO2 forcing of 1.66 W/m2. If I were an AGW convictee, the closeness of these figures along with the uncertainty regarding aerosols would concern me.
Good article! But I do have to echo #10: what exactly does “low level of understanding” mean?
I take it to mean that we’re pretty sure about the direction of net forcing due to aerosols is, but we need more information to pin down the magnitude. Is this pretty accurate?
The reason I ask is because the length of the error bars in the “low understanding” categories vary a lot.
Re 11:
I’m confused about why you’d expect this article to address C02 as a greenhouse gas. There is plenty of information on this website about that topic. You clearly intended to say something with your questions, but I don’t get it…
Scientists are acting as enablers, this is a social issue not a scientific one. I think scientists should show the world some tough love.
Re: Post #20 by Paul M.
…..I think scientists should show the world some tough love…..
Paul, that’s a very astute comment. Thank you.
I would like to know the calculation behind this part of the article:
First, I think it is more accurate to describe the lifetime of CO2 as half will be gone in 20 years, while 20% will remain in the air for centuries (at least according to this).
I would phrase the question as comparing the impact of running a coal plant for 100 years compared to replacing it with a clean energy source. The aerosol forcing of the coal plant will remain constant over the century, while the carbon dioxide impact will gradually accumulate. The key values, which I do not know, are the forcings from the amount of aerosol and CO2 emitted from the plant.
I find it surprising it takes a century of CO2 emissions to catch up to the aerosol forcing. It means that any action we take to reduce CO2 emissions will be effective on a longer time scale than I thought (which was already long), and the net effect will be less.
[Response: That’s exactly right: Juliane got that part wrong. We’ve been trying very hard to set the record straight. It is wrong to say that a CO2 molecule has a lifetime of “about 100 years” in the atmosphere. It takes more like 500-1000 years for the ocean to remove 80% of the Co2, and there’s a tail that extends for at least 10,000 years. Don’t know how we overlooked that, but c’est la vie. See David Archer’s article on CO2 lifetime in the archives. In any event, the main thrust of Julianne’s point, which is that CO2 stays around for a long time but aerosols disappear fast, is even more valid. Since sulfate pollution and other things that go with dirty coal have a lot of adverse environmental consequences one needs to get rid of, this just means one has to work even harder at reducing CO2. –raypierre]
#18’s comment reminded me of another point that is often lost when discussing the climate effects of aerosols. The numbers given by the IPCC are GLOBAL averaged forcings. Aerosols, due to their short lifetimes, are not everly dispersed throughout the atmosphere the way greenhouse gases are (with the main exception being ozone). The aerosol burden in one region might be quite positive (due to high soot loadings as a simple example) while in another it might be strongly negative (due to high ammonium nitrate and organic carbon loadings from agricultural areas, for example). Thus, the REGIONAL climate impacts of aerosols really need to be considered, particularily their effects on precipitation. It is too simplistic to think that the negative (and quite uncertain) forcing of aerosols cancels out most of the positive forcings of GHG. Though it is easy to see how this misconception arises.
Re #22: Somewhat closer to home, we have this article which gives a mean lifetime of about 30,000 years for a CO2 molecule, with the warning that this is a bit misleading due to the nonlinearity (or perhaps I should say the non-logarithmic linearity) of the decay process. It would be nice if we could agree on a metric for CO2 atmospheric lifespan to avoid confusion, but I’m too confused to propose a good one.
Remember also, the warming caused by increased CO2 has a time lag
What is the lag time?
Re #22 This question has been addressed in an earlier post,
Water vapor: feedback or forcing?
In the green comments to comment #85.
Here is an engineer’s view of the problem –
Residence time of atmospheric CO2
Bottom line – CO2 residence times are much longer than 20 years.
Hope this helps (and the links work)
Re #26 and my own #24: Thanks for the link to Professor Lam’s paper. I am happy to accept his metric, which gives an answer for practical purposes of about 400 years, which is consistent with the rule of thumb given in the RC post I linked.
So how fast is the science on this advancing? How important is this level of scientific understanding to the accuracy of the climate models. And how much does each of those LOSU values contribute to the uncertainties in the IPCC warming estimates?
My question is this: Doesn’t the uncertainty in the aerosol forcing imply equivalent uncertainty in the other anthropogenic forcings? Since the overall increase in ghg related emissions is highly correlated if looked at averaged over the whole 200 years since industrialisation, error or uncertainty in one would imply more uncertainty in the balance between forcings, but less in the overall forcing than you’ve shown. I thought the overall forcing would have been calculated and cross-checked against the measured overall temperature differential. I imagined this to be quite accurate. On the other hand, when CO2 concentrations are increasing, and aerosols are decreasing (say due to the collapse of dirty eastern-bloc industries) it would be hard to tease out which was causing observed increases in temperature.
In reply to Marcus L. #19, this article compares CO2 and aerosol forcing and examines the incremental change in forcing due to incremental changes in CO2 and aerosol concentrations. It is important to note that a certain percentage change in CO2 produces a smaller percentage change in forcing due to nonlinearity. I wonder if the climate forcing of a given aerosol (whatever this may mean, since aerosol concentrations are regional, as pointed out in #23 by Ryan Sullivan) is linearly related to its local concentration.
Also, CO2 absorption is due to molecular resonance and is narrow-band. Aerosol scattering is described (I think) by geometrical optics and is broad-band, compared to CO2. Radiation to space at the CO2 resonant frequency takes place from a much higher altitude than the reflection of short-wave sunlight or thermal equilibrium long-wave IR radiation from an aerosol.
While trying to write an intelligent comment I realize how complicated this stuff is. Enough already!
The uncertainty in aerosol forcing looks unsettling, but this is a good example of the case where one needs to ask: What are the consequences of this uncertainty for our predictions of future climate? One way that the uncertainty affects the future is through the warming due to the decline in aerosols if we move to cleaner burning technologies. If the present forcing is large, the warming due to aerosol decline willl be larger, and conversely. The uncertainties in aerosol forcing also have some consequences for deciding which models have the “best” climate sensitivity, though the precise implications of that are a bit harder to see. One thing to keep in mind is that, if CO2 continues to increase, the CO2 increasingly overwhelms the aerosol forcing, so aerosol uncertainty may play less role in the future than in the past century. A further thing to notice is that, as one commenter mentioned, the aerosols are not uniformly distributed; there’s considerable regional variation. That means that a climate with a lot of CO2 warming partially offset in the global average by a lot of regional aerosol cooling is still a very different climate than one with no anthropogenic aerosols and less CO2. It’s still, as Hansen says, a different planet we’ll be living on.
I’d be interested in hearing more discussion from the aerosol experts here about what it would imply for the aerosol forcing to be on the low end of the range, vs. what it would imply for the aerosol forcing to be on the high end of the range.
Keep in mind also that, while the article chose to compare just CO2 radiative forcing with aerosols, there are other anthropogenic greenhouse gases. You could just as well take the sum of radiative forcing from the “lesser” greenhouse gases: CH4, N2O,halocarbons and ozone, which amount to about 1.2 W/m**2, and net them against roughly 1.2 W/m**2 of aerosol cooling. Put that way, you’d say the midrange estimate of aerosol forcing cancels out the radiative forcing from the lesser greenhouse gases, leaving us with the full effect of CO2 as if the “complications” weren’t there. Or, Jim Hansen, for some reason, likes (or liked) to say that the aerosols canceled out most of the CO2 radiative forcing, leaving us to see a little of CO2 plus a lot from the other greenhouse gases. That’s no more nor less valid, but it did open up his paper to a lot of misinterpretations by the media, which then got the message that Methane’s the problem, not CO2. The fact is that for the greenhouse gases, radiative forcing is radiative forcing, and it doesn’t make much sense to break it apart when comparing to aerosols. It makes sense to break it apart mainly because the different gases have different atmospheric lifetimes
I have a question not directly related to the topic of aerosols but to a point that someone brought up higher in the discussion. Chevron and other big combustion players maintain blogs on which there are seemingly inexhaustible supplies of skeptics who can sound technical enough to be convincing for most of the general public. One of their favorite battle horses is the absorbtion spectrum of CO2, which they maintan is too narrow to account for the forcing attributed to the gas. Any help on that?
[Response: See the discussion of the spectrum of CO2 absorption in Dave Archer’s global warming text, and play with the online models. For a more technical discussion, take a look at my climate textbook (draft online, chapter 4, see geosci.uchicago.edu/~rtp1 ), or Goody and Yung. We don’t have an article on this because only the least informed skeptics are using the argument anymore, and nobody of any consequence believes it. Perhaps we ought to have something like that in the wiki, for general education. –raypierre]
RE: 22
An estimate of anthropogenic CO2 inventory from decadal changes in oceanic carbon content
Proceedings of the National Academy of Sciences, (2007)
doi:10.1073/pnas.0606574104
http://dx.doi.org/10.1073/pnas.0606574104
…”Approximately half of the anthropogenic carbon released to the atmosphere from fossil fuel burning is stored in the ocean, although distribution and regional fluxes of the ocean sink are debated. Estimates of anthropogenic carbon (Cant) in the oceans remain prone to error arising from (i) a need to estimate preindustrial reference concentrations of carbon for different oceanic regions, and (ii) differing behavior of transient ocean tracers used to infer Cant.”…”In contrast to prior approaches, the results are independent of tracer data but are shown to be qualitatively and quantitatively consistent with tracer-derived estimates. The approach reveals more Cant in the deep ocean than prior studies; with possible implications for future carbon uptake and deep ocean carbonate dissolution. Our results suggest that this approachs applied on the unprecedented global data archive provides a means of estimating the Cant for large parts of the world’s ocean.”
Distribution and inventory of anthropogenic CO in the Southern Ocean: Comparison of three data-based methods
Journal of Geophysical Research 110 (c9), 09-2 (2005)
doi:10.1029/2004jc002571
http://dx.doi.org/10.1029/2004jc002571
…”North of 50°S, distribution and inventories of Cant are coherent with previous data-based and model estimates, but we found larger storage of Cant south of 50°S as compared to the midlatitude region. In that, our results disagree with most previous estimates and suggest that the global inventory of anthropogenic CO2 in the Southern Ocean could be much larger than what is currently believed.”
Response to Comment on “The Ocean Sink for Anthropogenic CO2”
Science 308 (5729), 1743d (2005)
doi:10.1126/science.1109949
http://dx.doi.org/10.1126/science.1109949
….”The correct determination of the magnitude and uncertainty of the oceanic uptake of anthropogenic CO2 and of the climate change feedbacks is of prime relevance to constrain the net balance of the terrestrial biosphere over the past 200 years”..
Climate-carbon cycle feedbacks under stabilization: uncertainty and observational constraints
Tellus B 58 (5), 603 (2006)
doi:10.1111/j.1600-0889.2006.00215.x
http://dx.doi.org/10.1111/j.1600-0889.2006.00215.x
…”However, the observational record proves to be insufficient to tightly constrain carbon cycle processes or future feedback strength with implications for climate-carbon cycle model evaluation.”
The Oceanic Sink for Anthropogenic CO2
Science 305 (5682), 367 (2004)
doi:10.1126/science.1097403
http://dx.doi.org/10.1126/science.1097403
…”The current fraction of total anthropogenic CO2 emissions stored in the ocean appears to be about one-third of the long-term potential.”
As a counter-assertion to some denialists’ assertion of solar forcing being way bigger than the graph shows, I’d like to assert that the forcings from CH4, N20 and Halocarbons are double what the graphs indicate, and that the forcing from CO2 is less than half that. I have said before that this would imply a big policy shift. Neither the cold case evidence or the CSI evidence seems to be able to disprove this assertion. Am I missing some critical scientific experiment here that would change my skeptical mind? I’m not sure of the author of that graph, but what makes them so confident about their CO2 vs CH4 forcings being accurate to within 20% of their ranges or so?
[Response: The forcings by the greenhouse gases have little uncertainty because their concentrations are accurately measured in the atmosphere, and their infrared absorption properties are very accurately measured in the laboratory. The two are put together using highly accurate numerical methods that have little error. The small uncertainty is primarily because the radiative forcing depends on temperature profiles (well observed), water vapor profiles (somewhat less well observed) and cloud profiles (with additional uncertainties). The water vapor and clouds come in because you get little additional radiative forcing from greenhouse gas increases below a thick cloud. Similarly, water vapor competes somewhat with absorption due to the other greenhouse gases. There is no plausible ways these uncertainties could be stretched to accomodate the scenario you are proposing. –raypierre]
Raypierre (#32),
If you want to see one aerosol expert’s view, look here.
I happen to think it’s greatly exaggerated (in fact my views have strengthened since writing that post), but then he’s the one writing in Nature and I’m the one merely blogging about it :-)
(If you follow the links you will find RC has also talked about it before.)
[Response: All very good points to be reminded of, in the context of the present discussion. –raypierre]
Thanks, everyone, for the interesting & informative discussion.
There were several comments and questions about uncertainty (error bars in the figure) and the assigned “level of scientific understanding” for each forcing. The full description of how these were derived in the new IPCC 4AR will be published with the full Technical Summary later this spring, but I assume they will be essentially the same as in the predecessor 2001 IPCC TAR. In that case, the error bars on the radiative forcing plots represented the spread in published estimates of the forcing for each source. The subjectively assigned “level of scientific understanding” (LOSU) was defined in chapter 6 of the TAR as representing “our subjective judgement about the reliability of the forcing estimate, involving factors such as the assumptions necessary to evaluate the forcing, the degree of our knowledge of the physical/chemical mechanisms determining the forcing, and the uncertainties surrounding the quantitative estimate of the forcing.”
So, to post #29: the LOSU don’t affect warming estimates at all.
Re #17: yes, the solar irradiance forcing represents the change since 1750, as are all the forcings on this plot.
Re #22 etc.: Thanks, Ray, for correcting my error on the CO2 lifetime. My apologies for perpetuating a misconception. I have, however, seen these “low” CO2 lifetimes thrown around a lot, presumably because as David Archer points out: “If one is forced to simplify reality into a single number for popular discussion, several hundred years is a sensible number to choose, because it tells three-quarters of the story, and the part of the story which applies to our own lifetimes.” (I put low in quotation marks, because I think 100 years would be plenty long enough to encourage some proactive public policy, if anything longer would) Some basics of why CO2 lifetime is effectively much longer than 100 years have been discussed in these comments by now, but for anyone interested in more detailed discussion, the full post from David Archer about CO2 lifetime, is here.
Re #30: Uncertainty in aerosol forcing doesn’t directly imply uncertainty in other forcings, because there are additional constraints on those other forcings beyond just the last 250 years. For a nice discussion of climate senstivity, check out this post.
Thanks, Ryan and others, for bringing up regional variability in aerosols. This is an incredibly important point, and one which I am certain will be addressed thoroughly in the technical summary portion of the IPCC report. So of course we shouldn’t make too much out of the globally averaged aerosol forcing.
Let me amplify on #37: here’s the other RealClimate link (that James’ blog point to) I should have put in my comment about climate sensitivity and how uncertainty in aerosols relates to future climate projection:
https://www.realclimate.org/index.php?p=115.
thanks James.
This was a great primer on aerosols. In my never-ending quest to understanding climate science the one area I was almost clueless on was aerosols ;)
On raypierre’s response to Philippe Chantreau #33, sometimes people who are trying to learn about climate science and who hear alot of information in the popular media and the internet don’t realize how much of the science is not controversial within the scientific community. Some of the facts are so well settled that you will not see them a journal paper. To find out about it you have to consult a basic science textbook
Sometime ago, I made a figure showing the removal of carbon dioxide from the atmosphere. A large chuck (70-85%) will be expected to be removed from the atmosphere after ~200 years, but in actuality it has just been transferred to the ocean and biosphere. Ultimately removing the excess carbon from the atmosphere-biosphere-ocean system occurs primarily through the production of carbonate rocks and may take 100s of thousands of years to fully occur.
Incidentally, as a historically anecdote, the TAR said that carbon dioxide had a residence time of 5 to 200 years. This memorable statement is based on the Wigley 1991 carbon cycle model where ocean uptake was modeled as a sum of five processes. Four of those processes had lifetimes ranging from 5 to 200 years. However, the fifth process had a lifetime of infinity! Wigley’s model, which in that iteration was only intended to predict a few thousand years, actually used the approximation that 15% of carbon never left the atmosphere. This got rather muddled when the IPCC used the 5-200 numbers but didn’t effectively convey that there was an additional portion that essentially never dissipates (from the point of view of human time scales).
RE #18:
It is staggering to consider that the error bar for the forcing caused by aerosols includes a negative number that is larger than even the highest number in the error bar for the positive forcing of GHGs.
If I were a skeptic, this is clearly the fact I would harp on.
So the forcings of greenhouse gases would be greater if it was not for humans releasing counter chemicals which are often a product of burning coal in particular.
Therefore if we moved to clean coal technology we might not release much carbon into the atmosphere but also aerosols will lessen and hence warming would take some time to lessen in fact it might even rise tempoarily. I am presuming that aerosols are responsible for some of the so called global dimming effect?
[Response: For health reasons and acid rain reasons, you have to switch to clean(er) coal anyway. Even China is doing some of that already. If one insists on keeping aerosols in the atmosphere as part of the solution, one is going to need to put them there deliberately, and in a way that is less environmentally destructive than burning coal dirty. I myself doubt that it’s a viable solution, but people do talk about it. –raypierre]
One and all,–thank you, thank you, thank you for a sparkling discussion. Particularly, I thank Julianne Fry and Ray Pierre for bringing out the problem of conveying to lay folk like myself (who must take off their socks to count above ten) CO2’s life time. I say better a sudden and briefer rise in global heat with the shut-down of CO2 generators than with our Business As Usual. For psychologists it must be a puzzle that some of us understand compound interest in one context and not in another.
RE: 43 In Pollutant Removal Race, CO2 Beaten by S
Although touched on in the introduction to this topic, it is important to clarify the difference between how easily and rapidly the sulfate aerosol precursors can be removed from fossil fuel sources vs. carbon from combustion sources or fuels.
Technologies already exist and are being employed to desulfurize coal and petroleum, either pre- or post combustion. The issue there is how rapidly these removal technologies can be applied to, e.g., a new coal-fired power plant in China or a new refinery.
There are no large-scale technologies for removing carbon or CO2 from these sources and probably won’t be for at least 20 years. Thus, it is more likely that the negative forcing from tropospheric aerosols will decline and become insignificant well before any significant removal of carbon or carbon dioxide takes place. Bottom line. Don’t count on that -1.2 or -1.5 W/m2 to help out after 2050 and expect to see it decline by several percent every year.
The relative lifetimes of CO2 and aerosol in the atmosphere result in the expectation that reducing fossil fuel use will accelerate warming. A CO2 molecule has a lifetime of about 100 years in the atmosphere, while an aerosol particle has an average life expectancy of only about 10 days. Therefore, if we instantaneously ceased using combustion engines, the (cooling) fossil fuel-related aerosols would be cleaned out of the atmosphere within weeks, while the (warming) CO2 would remain much longer, leaving a net positive forcing from the reduction in emissions for a century or more.
How does the expected life time of an aerosol being 10 days square up against a half life of a volcanic erruption of a 1-1.5 years
Hansen et al (1992).
Nick
[Response: The difference is whether the aerosols are in the troposphere (the lower part of the atmosphere where all the ‘weather’ is), or higher up in the stratosphere. The main removal process for aerosols is related to rain and clouds, and up in the stratosphere there isn’t any to speak of. Thus once things get up there (for instance after a large volcanic erruption), they stay around for a lot longer. – gavin]
How is the LOSU determined? Is it based on the range of uncertainty re: forcing?
Please can you give us some responses, for the third or fourth time, about recent evolution of aerosols forcings (with links if possible) and concerning the definition of LOSU and its application to the quantification of aerosols forcing?
If it is not possible, please, say it.
Juliane-SO2 dissolves in water vapor to form H2SO3, sulfurous acid. Some of the sulfurous acid is subsequently oxidized to H2SO4, sulfuric acid. The sulfurous/sulfuric acid portion of the particles which we see as white haze is actually composed of tiny transparent spherical liquid droplets in the 0.01 to 10 micron diameter range.
Transparent spherical bodies, including water, are retroreflective i.e. they reflect light directly back to the source of illumination. A common example is the glass beads used in highway signage and road stripes to send light back toward the headlights of approaching vehicles. I am sure this effect diminishes or disappears at some low diameter around the wavelength of light or about 0.7 microns for visible light.
My question is: does the retroreflectivity of the larger droplets, i.e. back towards the light source, play into the sulfur aerosol/water droplet issue or is it simply averaged out by the bulk effect of all the aerosol particles present in the apparently white haze?
RE # 46 & 47: please see the 1st paragraph of my post #37 above. LOSU is a subjectively assigned label, which is NOT connected to uncertainty or quantitative estimates of forcing. Since the full 2007 IPCC 4AR isn’t out yet, you can look at the last report, (2001 IPCC TAR), chapter 6, for discussion of LOSU and uncertainty on the forcing plot. It can be found here.
Digression: whenever Danny Bee or some other name posts another link and linked name to that page
climatechange3000 dot blogspotdot com
(that’s the all-hopeless “Climate Change and the End of Humankind, Circa Year 2500” website) does that enhance their Google ranking credibility because it’s a link from
RealClimate?
Just asking.
[Response: No, because I deleted it. To anyone else reading, attempted google bombing or commerical postings in comments are simply going to be removed. -gavin]
Oregon study showing increasing trend for direct normal solar irradiance. Decreasing cloud cover is blamed, but aerosols also mentioned.
http://solardat.uoregon.edu/download/Papers/DirectNormalTrends.pdf